In today's rapidly advancing technological landscape, precision measurement has become the cornerstone of modern industry, and dynamic torque sensors represent an indispensable part of that foundation.
In modern industrial production and scientific research, torque serves as a critical parameter in rotating power systems. Its accurate measurement is essential for improving efficiency, reducing energy consumption, and ensuring equipment safety. As precision instruments capable of real-time torque measurement in rotating systems, dynamic torque sensors have become indispensable tools across multiple fields.
This article will provide an in-depth look into the application world of dynamic torque sensors, revealing their important role in various industries.
1. What is a Dynamic Torque Sensor?
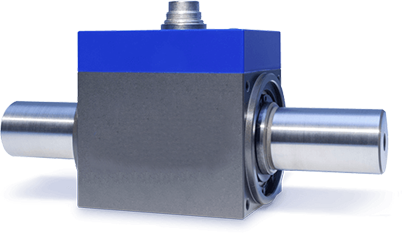
A rotary torque sensor is a precision measurement instrument used to measure various torques, rotational speeds, and mechanical power. It can detect in real-time torque variations in rotating power systems and convert torque signals into measurable electrical signals for output.
Based on their working principles, dynamic torque sensors are primarily divided into two types: strain gauge type and non-contact type. Strain gauge sensors employ strain gauge electrical measurement technology, forming strain bridges on elastic shafts that can measure electrical signals from shaft torsion when powered. Non-contact sensors, meanwhile, use a unique non-contact method for wireless transmission of torque signals without wear parts like collector rings, enabling high-speed operation over extended periods.
2. Working Principle of Dynamic Torque Sensors
2.1 Strain Gauge Torque Sensors
Strain gauge torque sensors operate based on the resistance strain principle. Precision resistance strain gauges are attached to the sensor's elastic body and form a Wheatstone bridge structure. When torque acts on the elastic body, it deforms accordingly, causing resistance changes in the strain gauges due to this deformation.
This resistance change subsequently unbalances the Wheatstone bridge, which then outputs a voltage signal linearly related to the torque. Finally, this signal is引出 via current collectors for subsequent processing and analysis.
2.2 Non-contact Torque Sensors
Non-contact torque sensors connect input and output shafts via a torsion bar. The input shaft has splines, while the output shaft has keyways. When the torsion bar twists under the steering wheel's rotational force, the relative position between the input shaft's splines and the output shaft's keyways changes.
The change in the relative displacement between the splines and keyways equals the torsion amount of the torsion bar, altering the magnetic induction intensity on the splines. These changes in magnetic induction intensity are then converted into voltage signals through coils. This **non-contact design** avoids wear and extends the sensor's service life.

Jinhui business center, No. 667, Yixian Road, Baohe District, Hefei City, Anhui Province, China